Вариационные методы¶
Краевую задачу для дифференциального уравнения можно переписать в эквивалентном интегральном виде. Например эллиплическое уравнение
эквивалентно вариационной задаче
При поиске ее решения можно использовать разложения по любому набору функций:
где \(\phi_0\) удовлетворяет граничному условию, а все \(\phi_i\) равны нулю на границе.
При этом задача минимизации сводится к
что эквивалентно системе из n линейных уравненй относительно \(c_l\):
которая легко решается.
Основная трудность прииспользовании вариационного метода заключается выборе базиса, подходящего для конкретной задачи. Базис должен представлять решение по-возможности малым числом функций (т.е. быть изначально «похожим» на решение), и интегралы, входящие в приведенные выше выражения, дожны легко считаться.
Одним из удачных решений является использования базисов с компактным носителем, наиболее простым их которых является базис, используемый в методе Рица. В нем используются непрерывные кусочно-линейные функции, каждая из которых отлична от нуля только в небольшой области вблизи узла сетки разбиения области решения уравнения. Пример используемых функций для одномерного случая приведен на рисунке.
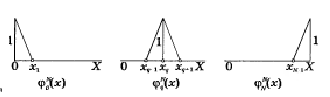
Базисный набор для метода Рица в случае одного измерения
Каждая функция при этом легко определяется:
Полная функция - линейная комбинация базисных: \(u(x) = \sum_{q=1}^n c_q \psi_q(x)\). Ее производная находится тривиально: \(u'(x) = c_q \psi'_q(x)+c_{q+1} \psi'_{q+1}(x), x_q<x<x_{q+1}\), а вторая производная равна нулю.
Применение вариационного принципа для указанного базиса приводит к системе линейных уравнений с ленточной матрицей, которая эффективно решается методом прогонки. Получаемый набор коэффициентов - значения искомой функции в узлах сетки разбиения.
Для двух и трехмерного случая базис строится аналогично. Сначала выбирается треугольная сетка (проводится триангуляция области G). Один из способов триангуляции в случае двух переменных показан на рисунке.
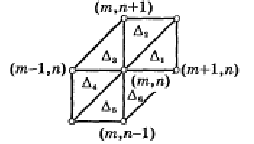
Триангуляционная сетка для метода рица в случае двух измерений
Затем строится базис:
строится искомая функция: \(U(x,y)=\sum_{i,j} c_{ij} \psi_{ij}(x,y)\);
и решается уравнение:
Все выражения, входящие в уравнения просто вычисляются, полученная алгебраическая система имеет разреженную матрицу и может быть эффективно решена на компьютере.